| 行政院農業委員會台南區農業改良場 研究彙報第37號 |
|---|
二行式甘藍收穫機之研製
施清田 鄭榮瑞 鍾瑞永 欒家敏
摘 要
施清田、鄭榮瑞、欒家敏•2000•二行式甘藍收穫機之研製。台南區農業改良場研究彙報37:71∼85。
本研究針對平地種植之甘藍,包括夏蜂與初秋兩個品種進行物理性質分析,以及機械採收特性試驗。並依據種植方式與物性資料,設計試造二行式甘藍收穫機。該機動力使用8 PS/1,800 RPM汽油引擎,行走裝置為履帶式底盤,具有原地轉彎之性能。採收行株距在45公分×40∼50公分範圍。二行式甘藍收穫雛型機,主要包含:行走機構、傳動機構、引導收集拔取圓盤機構、提昇輸送螺旋滾輪機構、壓頂導正輸送機構切根機構、側邊球體導正夾送機構與上部皮帶輸送機構、切莖機構、莖葉排出輸送機構及球葉排出輸送機構等部份。二行式甘藍收穫雛型機經田間性能測試結果,拔株率97%,切根率100%,切莖率100%,切口整齊率89%;行走速度0.27公尺/秒,估算作業能力約0.08∼0.1公頃/小時。
關 鍵 詞:二行式、甘藍、收穫機
接受日期:2000年5月18日
前 言
甘藍為本省大宗蔬菜之一,臺灣地區86年栽培面積達8.8千多公頃,總產量約25.2萬公噸(1)。栽培期以冬季裏作面積最多,達到3.4千公頃。主要栽培地區在彰化、雲林、台中、宜蘭、嘉義及南投等地區,約佔全省栽培面積 78% 以上。每公頃平均種植株數約為3.3萬株至3.7萬株。甘藍種植一畦種植兩行,位置交錯呈三角形。作畦規格有地域性與季節性的差異。收穫期依品種不同,自定植至採收適期約為50∼80天,收穫量因季節及栽培地區差異,每公頃產量15,000∼60,000公斤。甘藍栽培生產過程包括育苗、整地、定植、施肥、中耕除草和培土、灌溉和排水、病蟲害防治及收穫等作業。根據調查報告(2),甘藍每公頃生產工時為713.3小時(裡作)∼740.5小時(二期作),其中收穫佔32.4∼38.6%(231∼286小時=28.9∼35.8工)。每公頃人工費用102,419元(裡作)∼111,130元 (二期作),其中收穫佔27.5∼33.9%。
本研究針對國內甘藍之生產環境及作業精度要求作整體性探討,並利用自日本引進 KOBASHI 牌(17、18、19、20、21、22)履帶式單行甘藍收穫機進行分析其各作業機構、作業性能與作業精度,以加速國內二行式甘藍收穫機的開發。日製自走式甘藍收穫機一次採收一行,經田間試驗顯示,機械作業性能穩定,收穫品質佳,且機型小,頗適合台灣地區使用。而為了配合機械採收能發揮最佳作業效率,經試驗結果採一畦一行時,全畦寬65公分,株距40公分或採一畦兩行時,全畦寬130公分,行距65公分及株距45公分較適宜,唯此種栽培方式與本省慣行一畦兩行的方式(全畦寬120公分,行距40∼50公分及株距40∼50公分)所發展之移植機、病蟲害防治機械略有差異,需適度調整因應。因其售價過高每台1,448,000元與機械作業能力每小時0.04公頃不成正比,造成收穫費用大增,若要能大量推廣給農友使用,應大幅調降售價及針對國內使用環境開發二行式甘藍收穫機,以提高田間收穫作業能力,解決甘藍栽培勞力不足的問題。
甘藍栽培機械化體系之建立,在栽培過程中唯獨收穫方面是項瓶頸。要解決甘藍田間收穫勞力不足及辛苦的問題,並能兼顧臺灣多數小田區栽培方式及一畦兩行的傳統栽培習慣。以往甘藍收穫機各機構組合包括為(5、6、8、9、10、13、14、15) 收集機構有圓盤式、螺旋錐式、犁頭式。鎇 切割機構有圓盤鋸、帶鋸、水刀。琷 輸送機構有螺旋輸送、皮帶輸送、鏈帶輸送。䒟 壓頂機構有壓頂滾輪、長爪皮帶、平面皮帶。𦷪 殘葉清除機構有偏心輪、皮帶輪、X型滑槽。䕑 卸料裝填機構有圓型竹簍、箱型大容器、搬運車或卡車等機構。本研究的目的在調查甘藍與機械收穫有關之物理性質和建立甘藍田間栽培環境的基本資料,以及探討分析國內外現有較佳之引導收集拔起機構、提昇輸送螺旋滾輪機構、切根機構、切莖機構、壓頂導正輸送機構、側邊球體導正夾送機構與上部皮帶輸送機構、莖葉排出輸送機構、球葉排出輸送機構等功能,做為設計研製二行式甘藍收穫機之參考。
試驗材料與方法
一、試驗設備與儀器
二行式甘藍收穫機雛型機。轉速計。計時器。懸吊式拉力秤、電子磅及刀子。游標尺、角度規、捲尺、皮尺。土壤穿刺計。
二、供試材料
甘藍菜:夏蜂,初秋。生長日數分別為定植後65天及60天。
三、試驗田區
地點:田間性能測試在台南區農業改良場試驗田。試區規格長49.5公尺寬10公尺,約0.05公頃;每隔兩星期種植一次,重複種植試驗。土壤性質為砂質粘壤土。
四、試驗項目與方法
𡛼 二行式甘藍收穫機性能規格測試與調查。
𥕛 作業功能測試比較。
琼 估算拔株率田間條件:行距在45公分,根莖長度在6公分以上,傾斜角度40度以下,球高10∼18公分。
鎇 拔株率:能經由引導收集拔取圓盤機構順利拔起的植株。
琷 切根率:能經由切根機構順利將甘藍株根部全部切除者。
䒟 切莖率:能經由切莖機構順利將甘藍株莖部全部切除者。
𦷪 切口整齊率:甘藍株經由切莖機構切除莖部,而不損傷預留外層2∼3片包葉者。
𥐥 試驗步驟
琼 以人工進料,將甘藍送入引導收集拔取圓盤機構經由傳動機構導入提昇輸送螺旋滾輪機構,觀察切根、切莖及壓頂導正輸送等各機構作業功能。
鎇 調整切刀上下位置,再以轉速計測定切刀轉速,求出最佳切刀角度及轉速。
琷 室內靜態模擬各傳動機構,並測試之。
䒟 二行式甘藍收穫雛型機田間性能測試與調查。
磮 機械成本效益分析(7)
二行式甘藍收穫機之作業成本共可分為五大項,分別是折舊費(De)、利息(In)、維修費(Ma)、油料費(Fu)及工資(La)等,全部以年花費來計算,並以年作業面積(Ar)平均,則每公頃的作業成本(Ca)可以如下公式所示:
Ca= ( De + In + Ma + Fu + La ) / Ar
=Pr (1-α) / Ar Np+Pr•i (1+α) / 2Ar+Pr•Cr/Ar Np+f•Hp•H/Ar+Lc•H/Ar.... ⑴
其中Ca:作業成本(NT$/ha);Pr:機械購入價格(NT$);Ar:作業面積(ha/years);Np:使用年限(years),α:機械報廢時殘留價格與購入價格比值;i:年利率;Cr:總維修費用與購入價格比值;f:燃油與潤滑油費用(NT$/hp•hr);Hp:機械之馬力數(hp);H:作業時間(hr/year);Lc:操作人員工資(NT$/ha)。
若以作業能量(Fc,單位為ha/hr)做為指標時,則作業成本的公式可轉換為下式:
Ca=Pr ( 1-α+Cr ) / ( Fc•H•Np )+Pr•i ( 1+α) / 2Ar+f•Hp/Fc+Lc/Fc....... ⑵
由上述公式可獲得二行式甘藍收穫機單位面積的作業成本,再分析其與作業效率的關係,以及討論機械與人工作業效益比較等,藉以證明機械收穫足以降低作業成本。
結果與討論
一、甘藍物理性質調查研究
甘藍的物性調查主要目的是在暸解甘藍的各種物理性質、栽培方式及田間生長情形,並利用統計分析方法所得結果找出資料中變異性小者,作為設計研發二行式甘藍收穫機採收頭及整體機構整合之參考依據。甘藍物性資料統計分析主要是求出各項物性的平均數及標準差,並算出物性資料 95% 的信賴區間。
二、甘藍栽培方式
國內甘藍種植皆以作畦栽培方式,全畦寬120cm,畦面寬80∼85公分,畦高20∼30公分,溝寬25∼30公分,每畦種植二行且交錯種植呈三角形,行距40∼50公分,株距40∼50公分。顯見各地農民種植習慣不盡相同。
三、機械採收甘藍時考慮的環境與作物相關條件
𡛼 甘藍田間種稙方式
一畦種植兩行且交錯種植呈三角形,行距40∼50公分,株距40∼50公分。
𥕛 作畦栽培方式
配合機械收穫之條件為全畦寬120公分,畦面寬80~85公分,溝寬25∼30公分,畦高20∼30公分。
𥐥 種植土壤的物理性質
種植的土壤不同,對採收時從土壤中拔起所需的力量有所不同及甘藍植株偏離種植中心線的偏移量亦有影響。
磮 甘藍形狀
機械設計研製考慮採收甘藍時相關的物理性質有株高、球高、球直徑、球重、株直徑、根莖直徑、根莖長、根莖彎折、甘藍偏移量、最低葉片離地高度及甘藍重等直接影響採收頭引導收集拔起圓盤機構、提昇輸送螺旋滾輪機構、雙行壓頂平面輸送機構、單行壓頂平面輸送機構、切根機構、切莖機構、側邊球體導正夾送機構與上部皮帶輸送機構等設計研製的參考數據。株直徑及球直徑為二組引導收集拔起圓盤機構寬度參考資料及收集器末端開口及其與地面傾斜角度設計參考數據。而表1為夏峰甘藍物性;表2為初秋甘藍物性。
項 目(Item) |
平 均(Average) |
標準 差(Deviation of standard) |
|---|---|---|
株高 |
38.50 |
3.21 |
球高 |
10.60 |
1.47 |
球徑 |
16.50 |
1.59 |
株徑 |
60.00 |
5.62 |
根莖直徑 |
3.09 |
0.33 |
根莖長 |
13.51 |
4.01 |
根莖彎折 |
1.82 |
0.52 |
甘藍偏移量 |
2.51 |
5.36 |
最低葉片離地高 |
2.63 |
1.45 |
葉莖部厚 |
3.85 |
0.71 |
垂直拔起力(kgf) |
16.00 |
4.98 |
傾斜28度拔起力(kgf) |
13.00 |
3.52 |
項 目(Item) |
平 均(Average) |
標 準 差(Deviation of standard) |
|---|---|---|
株高 |
40.50 |
3.75 |
球高 |
12.60 |
1.66 |
球徑 |
20.00 |
1.98 |
株徑 |
67.00 |
6.15 |
根莖直徑 |
3.70 |
0.41 |
根莖長 |
15.61 |
3.20 |
根莖彎折 |
1.75 |
0.46 |
甘藍偏移量 |
2.48 |
5.42 |
最低葉片離地高 |
3.21 |
1.72 |
葉莖部厚 |
3.65 |
0.51 |
垂直拔起力(kgf) |
16.00 |
4.75 |
傾斜28度拔起力(kgf) |
13.00 |
3.48 |
四、甘藍機械收穫之栽培配合技術
𡛼 栽培田區規劃配合
琼 田區狀態
栽培田區坡度在5度以下。避免使用在有塑膠布覆蓋之 栽培田區。田區內之石塊宜先清除。下雨時或剛下雨後,儘量避免進行收穫作業。
鎇 栽培模式
畦型應平整,且前後頭地不宜有橫畦,最好前後各留1∼1.5公尺頭地。作畦栽培方式:配合機械收穫條件需求,一畦種植二行且交錯種植呈三角形,全畦寬120公分,畦面寬80∼85公分,畦高20∼30公分,溝寬25∼30公分,行距45公分,株距40∼50公分。
𥕛 作物條件之配合
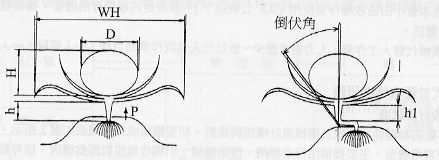
琼 甘藍之性狀之配合(如圖1)
甘藍球的倒伏角在40度以下;根部拔起力(P)小於40kgf;球直徑(D)120∼250公厘;球高(H)100∼180公厘;球形指數(H/D)0.6∼0.8;球重(W)3.5公斤以下;根莖大小(d)在20∼40公厘;根莖長度(h)60公厘以上、根莖彎折(h1)60公厘以上及外葉擴展(WH)700公厘以下。
|
|
圖1. 適合甘藍收穫機作業之主要物性。
Fig.1. The physical properties of principal to suit cabbage harvester operation Angle of lodging.
鎇 收穫適期
以結球適度肥大為收穫適期進行收穫,未成熟或過熟皆不適宜機械收穫(如表3)。
品種 Type |
成熟期(定植後) Maturity (days after transplanting) (days) |
球 形 heads shape |
裂 球 Crack of heads |
球重(公斤) Weight of heads (kg) |
|---|---|---|---|---|
秋豐 |
65天 |
扁圓 |
不易 |
1.8∼2.2 |
惠珍 |
65天 |
正圓 |
易 |
1.5 |
豐春 |
65天 |
扁圓 |
不易 |
2.0 |
初秋 |
60天 |
扁圓 |
不易 |
1.4 |
夏蜂 |
65天 |
扁圓 |
不易 |
0.8 |
海峰 |
65天 |
扁圓 |
不易 |
2.0 |
東豐 |
70天 |
扁圓 |
不易 |
2.5 |
和風 |
53天 |
扁圓 |
不易 |
2.0 |
高峰 |
50天 |
扁圓 |
易 |
2.0 |
夏光 |
45天 |
尖頭 |
易 |
1.3 |
夏秋 |
60天 |
扁圓 |
不易 |
2.0 |
南陽 |
50天 |
扁圓 |
易 |
1.8 |
新峰 |
50天 |
扁圓 |
不易 |
2.2 |
春陽 |
65天 |
扁圓 |
不易 |
1.8 |
旭光 |
65天 |
扁圓 |
不易 |
1.0 |
𥐥 頭地處理
田區頭尾先以手工收穫4公尺長,便於收穫機頭地轉彎。
磮 收穫作業的方法
由於甘藍收穫機之履帶行走在畦面上,每次收穫一畦二行,收穫時可由田區左右兩邊任選一邊,沿著種植行進行雙向迴繞收穫或單向迴繞收穫。
五、二行式甘藍收穫機規劃與設計構想
𡛼 作畦規格:
甘藍種植皆採作畦栽培,一畦種植兩行且交錯種植呈三角形。
𥕛 機械設計構想與方向
琼 配合本省小田區收穫作業使用(0.5公頃以下),以自走式履帶專用機型,機械體積小、操作容易、輕巧靈活。
鎇 以機械代替人工作業,人力需求量少,並以二人共同作業為目標,一人駕駛,一人協助採收作業。
六、二行式甘藍收穫機研製
𡛼 機械設計與試造(11、12)
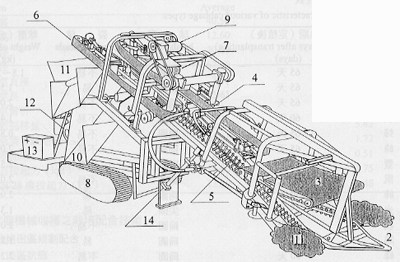
依據甘藍的物理性狀,做為機械設計構想與規劃。初型機組成結構構造如圖2所示。該機設計為自走式履帶專用機型,主要機構由行走機構、傳動機構、引導收集拔取圓盤機構、提昇輸送螺旋滾輪機構、壓頂導正輸送機構、切根機構、側邊球體導正夾送機構與上部皮帶輸送機構、切莖機構、莖葉排出輸送機構、甘藍球排出輸送機構、及操縱機構等部份。
 |
|
圖2. 二行式甘藍收穫機初型機之組成。
Fig. 2. The compose of two-row prototype cabbage harvester.
琼 行走機構
甘藍收穫機動力使用8ps/1800rpm汽油引擎,行走裝置為履帶式底盤,具有原地轉彎之性能,履帶中心距530公厘、最大寬幅690公厘、接地長625公厘、接地寬160公厘,行走部主變速前進高低二檔、後退一檔,副變速高低兩檔,因此前進四速,後退二速,行走前進速度0.27∼0.8公尺/秒,後退速度0.3∼0.7公尺/秒。
鎇 傳動機構包括鋼索、皮帶輪、變速箱、鏈條箱與齒輪箱組等,將引擎高速迴轉運動由皮帶輪減速到變速箱,再藉由皮帶、鏈條、鋼索、油壓組動力分導傳遞到驅動輪、引導收集拔取圓盤機構、提昇輸送螺旋滾輪機構、單行壓頂導正輸送機構、以及藉由30安培發電機供應蓄電池的電,帶動DC(直流)馬達驅動切根機構、切莖機構、雙行壓頂導正輸送機構、側邊球體導正夾送機構與上部皮帶輸送機構、莖葉排出輸送機構、及球葉排出輸送機構等。如圖3所示為二行式甘藍收穫機傳動系統方塊圖。
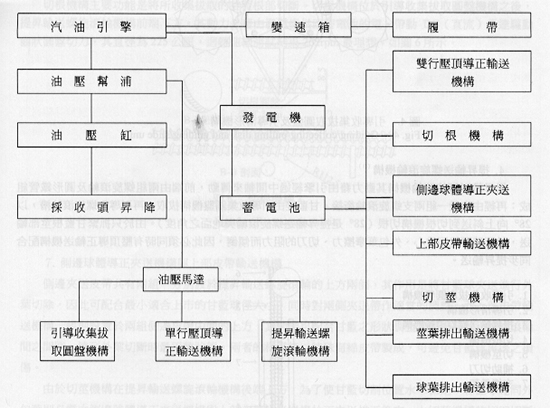
圖3. 二行式甘藍收穫機傳動系統方塊圖。
Fig. 3. The block diagram of two-row cabbage harvester power transmission system.
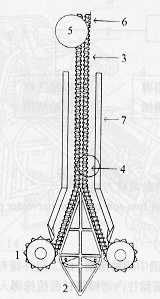
琷 引導收集拔取圓盤機構
拔取圓盤機構其動力藉由引擎經過中間軸傳動;由二組外緣有齒狀(節距80公厘)之圓盤傳動及調整機構構成,圓盤直徑300公厘,圓盤往內迴轉將甘藍植株導入後面收集機構,迴轉速為30轉。作業前應注意圓盤齒冠、齒根與相對圓形鐵管間的間隙(5∼10公厘)及夾持力(彈簧長45公厘),作業時調整圓盤山谷與相對圓形鐵管之間的前端插入介於地面和甘藍球外葉間。如圖4所示。
引導收集拔取圓盤機構是對於偏離中心線的甘藍給予順著圓盤邊緣的齒條向中央集中達到引導、收集、扶正、拔取的效果,將收集後的甘藍拔離畦面以利提昇輸送螺旋滾輪機構扶持及切根機構切根。
引導收集拔取圓盤與甘藍接觸點之切線速度為甘藍收穫機前進速度之3∼5倍時,收集效果最好(23、24、25、26)。
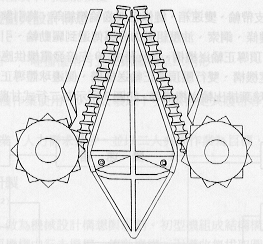 |
圖4. 引導收集拔取圓盤及引導滑形機構。
Fig. 4. Guiding/collecting/pulling disk and guiding/slide unit
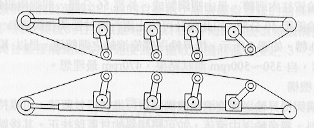
䒟 提昇輸送螺旋滾輪機構(3)
提昇輸送螺旋滾輪機構其動力藉由引擎經過中間軸來傳動,前端由兩組螺旋滾輪及圓形鐵管組成;再經由中段一組兩支螺旋滾輪銜接。甘藍經由引導收集圓盤機構拔取,再引導入螺旋滾輪槽,以28° 向上斜送到切根機構切根(28° 是提昇輸送螺旋滾輪與地面之角度)。由於只抓緊甘藍根莖部輸送,甘藍球可能因重心、外包葉摩擦力、切刀的阻力而傾倒,因此必須同時有壓頂導正輸送機構配合同步提昇輸送。
|
 |
琼 圖5. 提昇輸送螺旋滾輪機構。
Fig. 5. Lifting spiral conveyer unit.
提昇輸送螺旋滾輪皆往內迴轉,是由塑鋼製成,外徑56公厘,前端兩組螺旋滾輪節距30公厘,中段一組兩支螺旋滾輪節距40公厘,如此設計可防止兩行的甘藍菜在銜接為一行輸送時,不會發生積堵現象。其迴轉速470轉,如圖5所示。提昇輸送螺旋滾輪之迴轉速,是以 KOBASHI 牌甘藍收穫機之轉速400rpm為基準,自350∼500rpm測試結果,470rpm最理想。
𦷪 壓頂導正輸送機構
壓頂導正輸送機構與提昇輸送螺旋滾輪機構同步行進扶持甘藍球,可維持甘藍球在輸送中固定方向,防止左右前後傾斜,避免輸送中滾落,並可將傾斜的甘藍球扶正。其後端為擺動式樞軸,前端為浮動式以絞鏈固定,應配合最小可銷售甘藍球大小加以調整。
壓頂導正輸送機構則設於提昇輸送螺旋滾輪軸上方的一組皮帶,前段為二行式壓頂導正輸送機構,長為770公厘,寬為480公厘。其動力是藉由引擎經過中間軸來傳動壓送皮帶,其迴轉速為200rpm。
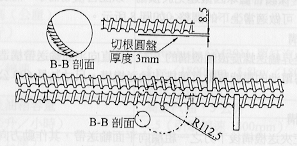
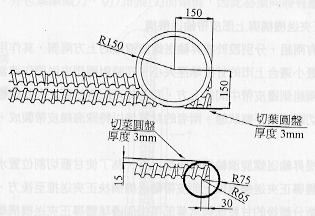
䕑 切根機構
切根機構主要功能是將所收集拔取的甘藍根部切斷。切根機構位於引導收集拔取圓盤機構之後,提昇輸送螺旋滾輪機構前端下方。其動力是藉由發電機供應蓄電池的電,帶動DC(直流)馬達驅動齒狀圓盤切刀,其直徑為225公厘,迴轉速經測試結果262rpm最理想。如圖6所示。
|
|
圖6. 切根機構。
Fig. 6. Root cutting unit.
疃 側邊球體導正夾送機構與上部皮帶輸送機構
側邊夾送皮帶共有兩組,分別設於提昇輸送螺旋滾輪的上方兩側,其作用是將甘藍球夾送進行外葉切除,因此可配合最小適合上市的甘藍球徑大小,同時對兩側夾送帶作適當的調整,而上部皮帶輸送機構一組則設置於兩組側邊皮帶中間的上方,其功能可配合甘藍之形狀調整其與提昇輸送螺旋滾輪間之間隙,達到外葉切斷時最平整狀態。兩者的材質皆以特殊海綿皮帶製成,可避免甘藍球夾送之損傷。
由於切莖機構在提昇輸送螺旋滾輪機構後端上方,為了使甘藍切割位置水平穩定,甘藍球連同外包葉則必需由側邊球體導正夾送機構與上部皮帶輸送機構扶正夾送推至後方,由切莖機構的切刀切斷甘藍球與莖葉部,切斷分離後的甘藍球與莖葉部再由側邊球體導正夾送機構繼續夾持後送,直到橫向平面輸送帶機構承接,以自由落體的方式使外包葉及甘藍球掉落到機體右方地上,由於是第一代實驗機,暫時不考慮收穫後的甘藍球收集問題。
側邊球體導正夾送機構、上部皮帶輸送機構與提昇輸送螺旋滾輪機構;三者速度必需同部行進,可避免甘藍球壓傷或拉傷。其動力是藉由發電機供應蓄電池的電,帶動24V之DC(直流)馬達、減速機,來驅動側邊球體導正夾送機構與上部皮帶輸送機構;其迴轉速度50rpm。如圖7所示。
|
|
圖7. 側邊球體導正夾送機構。
Fig. 7. Cabbage heads side clipping/guiding belt conveyer unit.
㽣 切莖機構
切莖機構主要功能是分離甘藍球之外的莖葉部。切莖機構是由24V之DC(直流)馬達、減速機、直徑300公厘之圓盤切刀、及切刀座所組成,是藉由發電機供應蓄電池的電,帶動DC(直流)馬達及減速機來驅動圓盤切刀;其轉速300rpm。圓盤切刀可上下自由調整間隙,達到控制甘藍球經切割後預留的外包葉數3∼4葉,保護甘藍球因搬運免於損傷,以配合市場需求。補助刀作用為輔助甘藍的外葉和甘藍莖葉部的分離,可做適當上下的調整。如圖8所示。
𤳙 莖葉排出輸送機構
設置於切莖機構及提昇輸送螺旋滾輪機構的下方,為直向平面輸送帶構造,用以將殘葉等輸送到排出口。其動力是藉由蓄電池的電能驅動莖葉排出輸送機構。尺寸為長690公厘、寬290公厘,轉速270rpm。
𤴆 球葉排出輸送機構
設置於側邊球體導正夾送機構後下方之一組橫向平面輸送帶,其作動方向與側邊球體導正夾送機構成直角,用以分離甘藍球與切除後之外莖葉,後傾作業角度調整約20°;其動力是電力帶動24V之DC(直流)馬達、減速機,來驅動球葉排出輸送機構。其尺寸為長590公厘、寬360公厘,轉速325rpm。
|
|
圖8. 切莖機構。
Fig. 8. Stem/leaves cutting unit.
𥕛 機械試造
試造完成之二行式甘藍收穫機之雛型機,機體尺寸長3,900公厘,寬1,260公厘,高1,450公厘;機體重量400公斤;履帶最大寬幅 690公厘;履帶(寬×接地長)160公厘×625公厘;履帶中心距 530公厘。履帶行走於畦面上,為一次採收二行,其收穫行距選定為45公分,株距為40∼50公分;行走速度於道路行駛0.47〜0.80公尺/秒、於田間作業0.27〜0.41公尺/秒;從引導拔取、輸送、切根、切莖到球葉分離一次完成,其作業能力估計約0.08∼0.1公頃/小時;處理速度1.08球/秒。
七、二行式甘藍收穫機性能規格調查與量測
𡛼 機械規格調查
二行式甘藍收穫機於田間試作,經初步測試結果,該機行進速度在0.41公尺/秒 (約1.58公里/小時) 作業時,引導收集拔取圓盤及提昇輸送螺旋滾輪,會有積堵現象發生。因此必須停車消化積堵後再前進作業,同時會有發生提昇輸送螺旋滾輪動力不足。為避免積堵,將行進速度修改為0.27公尺/秒(約0.97公里/小時)作業時,引導收集拔取圓盤及提昇輸送螺旋滾輪,就不會有積堵現象發生。提昇輸送螺旋滾輪動力不足,應提高引擎馬力。
雛型機性能規格如表4。
機 體 |
型 式 |
履帶自走式專用機 |
|
|---|---|---|---|
長×寬×高(公厘) |
3900×1260×1450 |
||
全重(公斤) |
400 |
||
引 擎 |
廠牌型式 |
Mitsubishi GM291L單缸汽油引擎 |
|
最大馬力/轉速 |
8 ps/1800rpm , 5.8kw/1800min |
||
起動方式 |
繩拉自動彈回式 |
||
使用燃料及油箱容量 |
高級汽油,5公升 |
||
耗油率(公升/小時) |
1.5(引擎轉速1800rpm) |
||
行走部 |
履帶外寬(公厘) |
690 |
|
履帶(寬×接地長)(公厘) |
160×625 |
||
履帶中心距(公厘) |
530 |
||
行 走 速 度 |
前進 |
一速﹝公尺/秒﹞ |
0.27 註:用於田間收穫 |
二速﹝公尺/秒﹞ |
0.41 註:用於行走 |
||
三速﹝公尺/秒﹞ |
0.47 註:用於行走 |
||
四速﹝公尺/秒﹞ |
0.80 註:用於行走 |
||
後進 |
一速﹝公尺/秒﹞ |
0.30 |
|
二速﹝公尺/秒﹞ |
0.70 |
||
收 穫 行 數 |
一次採收二行 |
||
收 穫 方 式 |
單向或雙向迴繞 |
||
收穫能力(公頃/小時) |
約0.08∼0.1 |
||
𥕛 適合甘藍收穫機之甘藍作畦栽培模式
甘藍種植皆採作畦栽培,一畦種植兩行且交錯種植呈三角 形,全畦寬120公分,畦面寬80∼85公分,溝寬25∼30公分,畦高20∼30公分,行距45公分,株距40∼50公分。適合甘藍收穫機收穫條件:球莖12∼30公分,球高10∼18公分,根莖最大徑4公分以下(公分),根莖長6公分以上。
八、二行式甘藍收穫機性能測試結果
二行式甘藍收穫機田間性能測試結果,拔株率97% ,切根率100%,切莖率100%,切口整齊率89 %,作業能力約0.08∼0.1 ha/hr,處理速度1.08球/秒。
九、作業能力測試結果
𡛼 人工作業調查:
根據臺灣農產品生產成本分析調查報告(2),人工收穫每公頃需花費231小時(裡作)∼ 286小時(二期作),即每公頃需花費28.9∼35.8人日。人工收穫作業成本,每公頃需花費23,120元(裡作)-28,640元(二期作),以800元/人日計算。
𥕛 機械作業試驗調查:
研製完成之二行式甘藍收穫機於試驗田區進行作業功能測試情形如上述。
十、機械作業成本估算與效益分析結果
𡛼 機械購入價格(Pr):600,000元,此金額為合作委製廠商吉利機械工廠預估該機將來商品化銷售的價格。
𥕛 年作業面積(Ar):50公頃
𥐥 使用年限(Np):10年,一般公務機關核定機械設備使用年限為6年,但農友則操作到不堪使用為止;而美國稅務署(IRS)曾建議以10年為農機具適當之折舊年限(16),所以本機使用年限為10年尚屬合理。
磮 機械報廢時殘留價格與購入價格比值(α):通常以10%計。
𣄃 年利率(i):5.5%,以目前的農機低利貨款計。
𡠪 總維修費用與購入價格比值(Cr):50%,以每年機械購入價格的5% 計,與公務機關核算的規定相同,其總維修費用為50%。
𣈴 燃油與潤滑油費(f):5.56元/馬力.小時,使用不同引擎轉速作業,油脂費用即不一樣,因要與人工作業相比較,所以採用小時收穫行、株距皆為45cm,且引擎轉速為1,800rpm進行作業。試驗田0.1公頃的時間約1小時、汽油消耗2.5公升,若汽油每公升為16.5元,且設定潤滑油費用為燃油的0.3倍(4),則換算該機每單位的馬力.小時的油費用是5 .56元。
㑤 機械之馬力數(Hp):8馬力。
𣈏 作業時間(H):每年500小時。
𣆂 操作人員工資(Lc):375元/小時,本收穫機操作人員二人,一般機械操作工每日工資為2,000元,協助女工每日工資為1,000元,每天工作八小時計,則每小時375元。
上述各項參數代入作業成本計算公式 ⑴ 中,可計算出收穫機每公頃的折舊費1,080元、利息363 元、油料費445元、維修費600 元、工資3,750元,每公頃的作業總成本為6,238元,與人工作業每公頃需28.9工(裡作)-35.8工(二期作),每工800元計算,裡作23,120元/公頃;二期作28,640元/公頃,兩者相比較,可節省16,881元(裡作)-22,401元(二期作),相當於 73%∼78.2% 的工作成本。
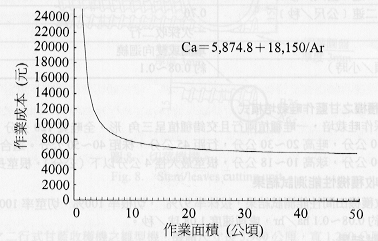 |
圖9. 二行式甘藍收穫機單位成本與作業面積之關係。
Fig. 9. The related to between operation cost and operation areas of two-row cabbage harvester.
當以作業能力(Fc)為指標,將各項參數值代入作業成本的公式 ⑵ 時,該公式可轉換為下式:
Ca=5,874.8+18,150/Ar
圖9為二行式甘藍收穫機單位成本與作業面積之關係,由圖中曲線可知,在Ar >20時,該線趨於平緩,意即甘藍收穫機年作業面積要超過20公頃,作業成本才較為合理。所以就本省甘藍菜施行小田區栽培習慣而言,僅個人購置、使用此收穫機較不划算,但採產銷班共用或代收穫方式最為適宜。
若以前述相同條件實施甘藍代收穫作業,每年收穫面積為20公頃,每公頃收費以18,000元計算,則每年有235,240元的淨收益,則需2.6年方可回收成本;但如果年使用面積增為50公頃,則每年有588,100元的淨收益,則僅需1.02年即可賺回成本。
結論與建議
琼 試造完成一部二行式甘藍收穫雛型機,該機主要機構有:行走機構、傳動機構、引導收集拔取圓盤機構、提昇輸送螺旋滾輪機構、壓頂導正輸送機構、切根機構、側邊球體導正夾送機構與上部皮帶輸送機構、切莖機構、莖葉排出輸送機構、及球葉排出輸送機構等部份。
鎇 二行式甘藍收穫雛型機適用於一畦兩行的作畦栽培方式,全畦寬120公分,畦面寬80∼85公分,畦高20∼30公分,溝寬25∼30公分,行株距為45公分×40∼50公分。
琷 二行式甘藍收穫雛型機經田間性能測試結果,拔珠率97%,切根率100%,切莖率100%,切口整齊率89%;各機構功能已接近成熟實用階段。
䒟 二行式甘藍收穫雛型機經田間性能測試結果,估算作業能力每 小時約0.08∼0.1公頃。
𦷪 利用該機收穫甘藍,每公頃的作業成本為6,238元,與人工作業每公頃需28.9工(裡作)-35.8工(二期作),每工800元計算,比較可節省16,881元(裡作)-22,401元(二期作),相當於73%∼78.2% 的工作成本。
䕑 為提昇甘藍收穫機械化,使用收穫機作業為必然趨勢,目前研製之二行式甘藍收穫機機型較小,頗適合臺灣地區使用。
疃 二行式甘藍收穫雛型機應進一步加強研究引導收集拔取圓盤機構與雙行彙整一行的提昇輸送螺旋滾輪機構的構造,而且進行雛型機的田間試驗與收穫機機構的改良工作,以期適應本省的環境條件,及在最短期間推廣農民使用。
誌謝
本計畫由行政院農業委員會經費補助,計畫執行期間承黃場長山內、陳課長文雄等全力支持與指導、農機研究室、梁紹發、鄭明賢、鄭志峰等先生之協助及傅泰裕先生協助繪圖,始得完成,本文稿承國立中興大學農業機械工程學系陳加忠副教授斧正,謹此致謝。
引用文獻
Studies on the Two-Row Cabbage Harvester
Shih, C. T., J. J. Cheng, J. Y. Chung and J. M. Luan
Abstract
This research investigated about the physical properties of cabbages grown on the plain included summer-bee and early-autumn species. The mechanical properties of these cabbage concerned with harvest work were tested. Based on the plant method and physical properties of the cabbages, the bi-row cabbage harvester was designed and manufactured. The machine adopted the 8 PS/1800 rpm gasoline engine. The traveling device selected the chassis with the function of spot turning . The main transmission of the traveling part contains two gears ( high and low ) forward and one gear backward, while the secondary transmission contains two sections ( high and low ); thus, there are 4 speeds forward and 2 speeds backward. The traveling forward speed is 0.27 – 0.8 m/second, and the traveling backward speed is 0.3 – 0.7 m/second. The harvesting row and plant spacing is within the range of 45 cm x 40 – 50 cm. The prototype harvester consists of the traveling mechanism, driving mechanism, guiding/collecting/pulling disk mechanism, lifting/conveying spiral roller mechanism, pressing/correcting/conveying mechanism, root cutting mechanism, lateral ball correcting/clamping/conveying mechanism, upper belt conveying mechanism, stem cutting mechanism, stem and leaf discharging/conveying mechanism, and bulb and leaf discharging/conveying mechanism.
By the field performance test, it the prototype of two-row cabbage the plant pulling rate was 97%, the root cutting rate was 100%, the stem cutting rate was 100%, and the neat cutting-edge rate was 89%. Traveling speed was 0.27 m/s, had the following characteristics: The estimated capacity is about 0.08 – 0.1 ha/hr.
Key words: Two-Row, Cabbage, Harvester
Accepted for publication: May 18, 2000